集合卡尔曼滤波在油藏自动历史拟合中的应用—以阿联酋鲁卜哈利盆地油田为例
1、什么是卡尔曼滤波?
卡尔曼滤波是指:优化从系统模拟和观测数据获得的先验信息的组合,以获得动态系统及其不确定性的最优描述。利用先验信息和观测数据之间的平衡来更新系统状态或参数的估计。特点:在线性状态空间表示的基础上对有噪声的输入和观测信号进行处理,求取系统状态或真实信号。
准确来说,它是一种:Optimal Recursive Data Processing Algorithm(最优化递归数据处理算法),但它只能处理简单的线性系统,对于油藏数值模拟这样高度非线性的系统不太适用。
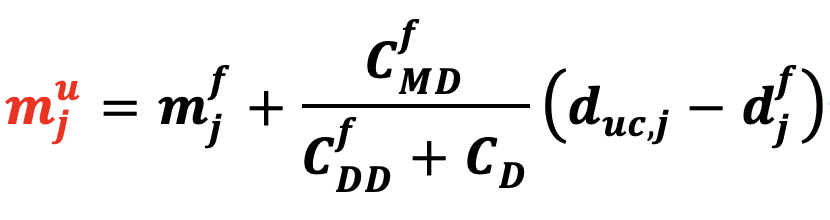
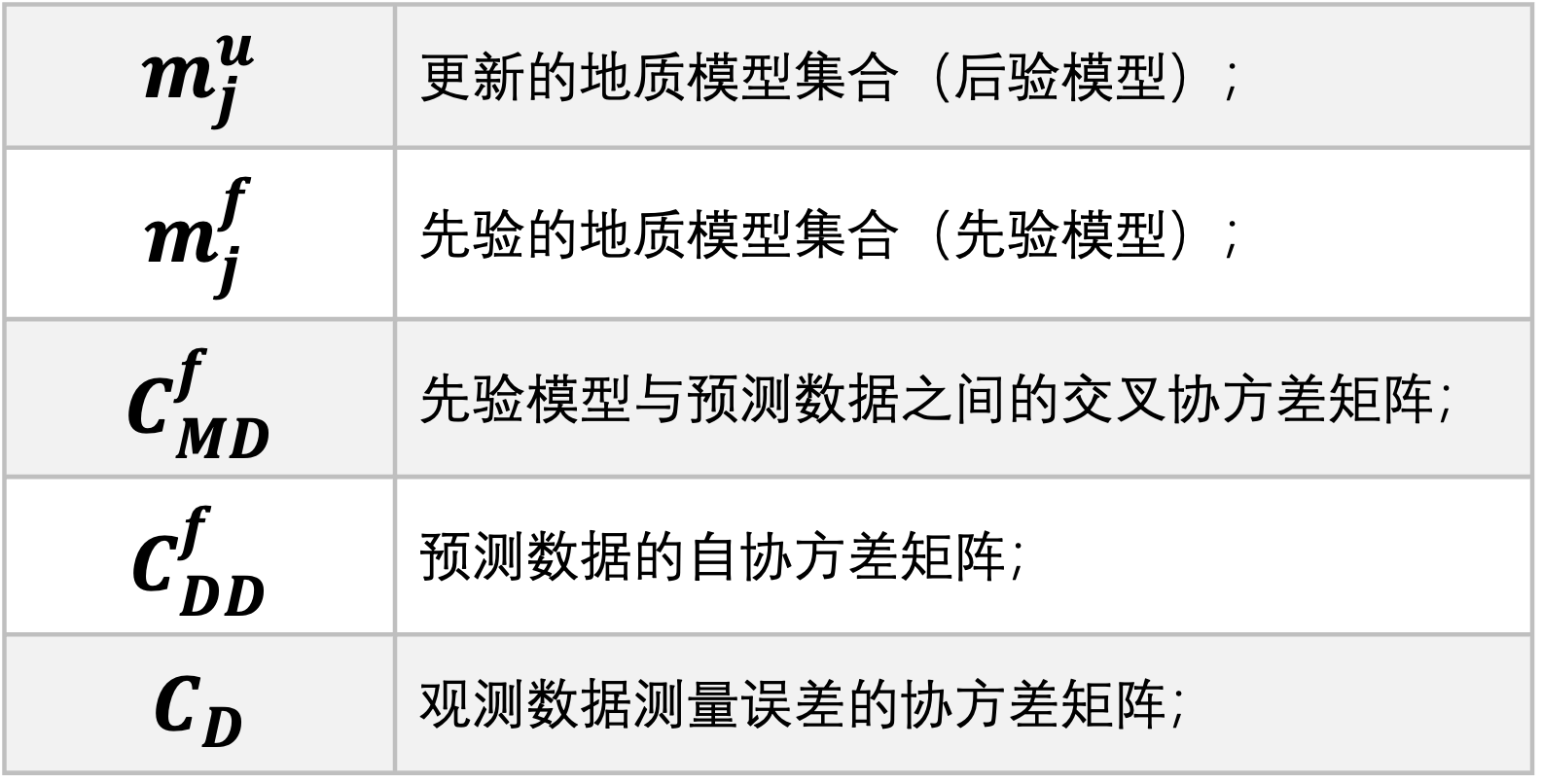
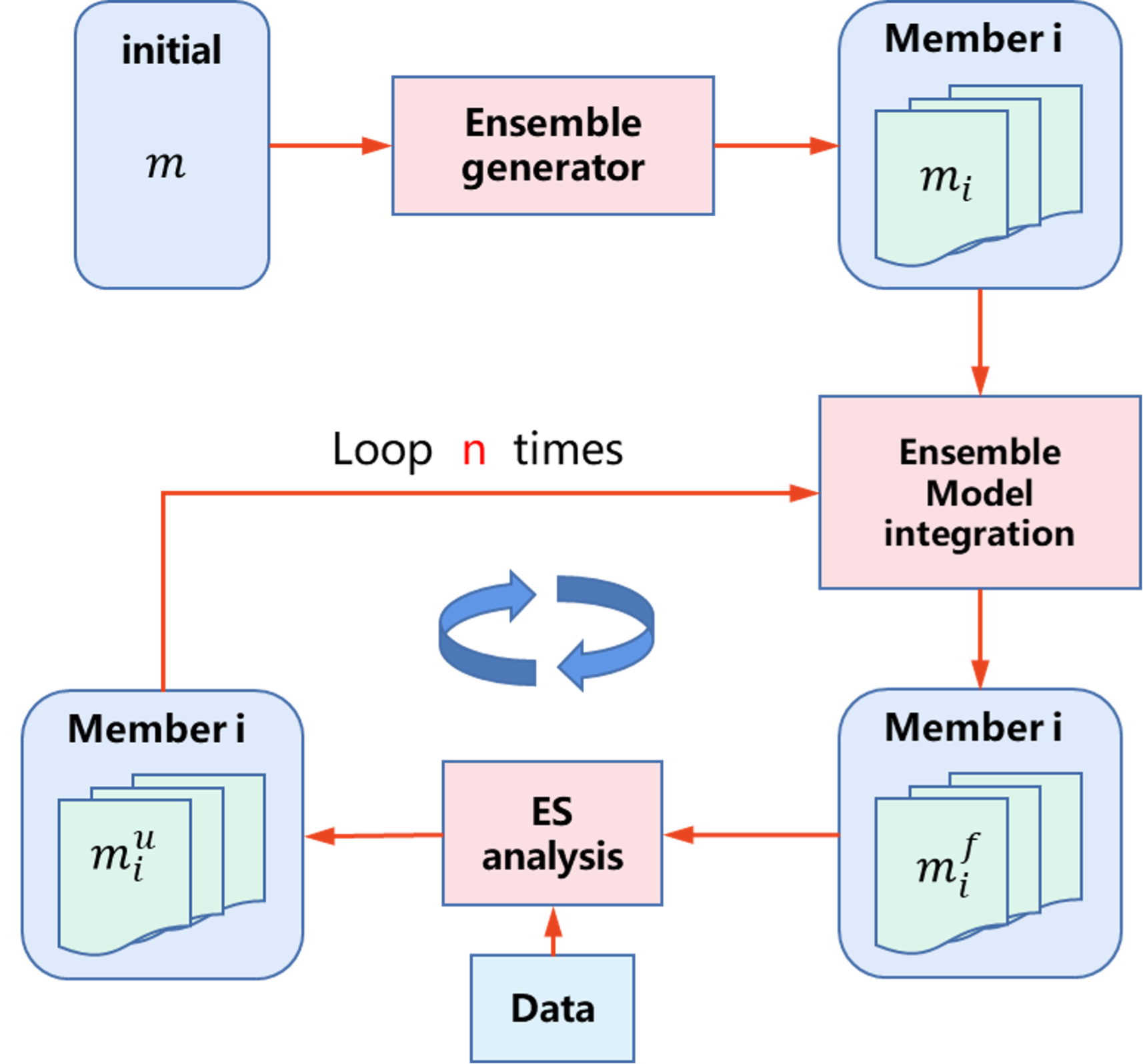
集合卡尔曼滤波(EnKF)是专门为非线性系统设计的。它引入了“集成”的概念,它包括一组从系统状态空间随机采样的点。这些样本覆盖了系统状态的不确定范围。它通过对整个模型进行整合来产生预测结果,然后在同化所有数据的同时来更新先验的不确定参数集合。随后,更新的参数用于重新运行模型,生成历史拟合模型预测的最终集合。不确定性模型的集合更新公式为:
2、集合卡尔曼滤波用于自动历史拟合案例
图2 Shu'aiba Fm油田地址
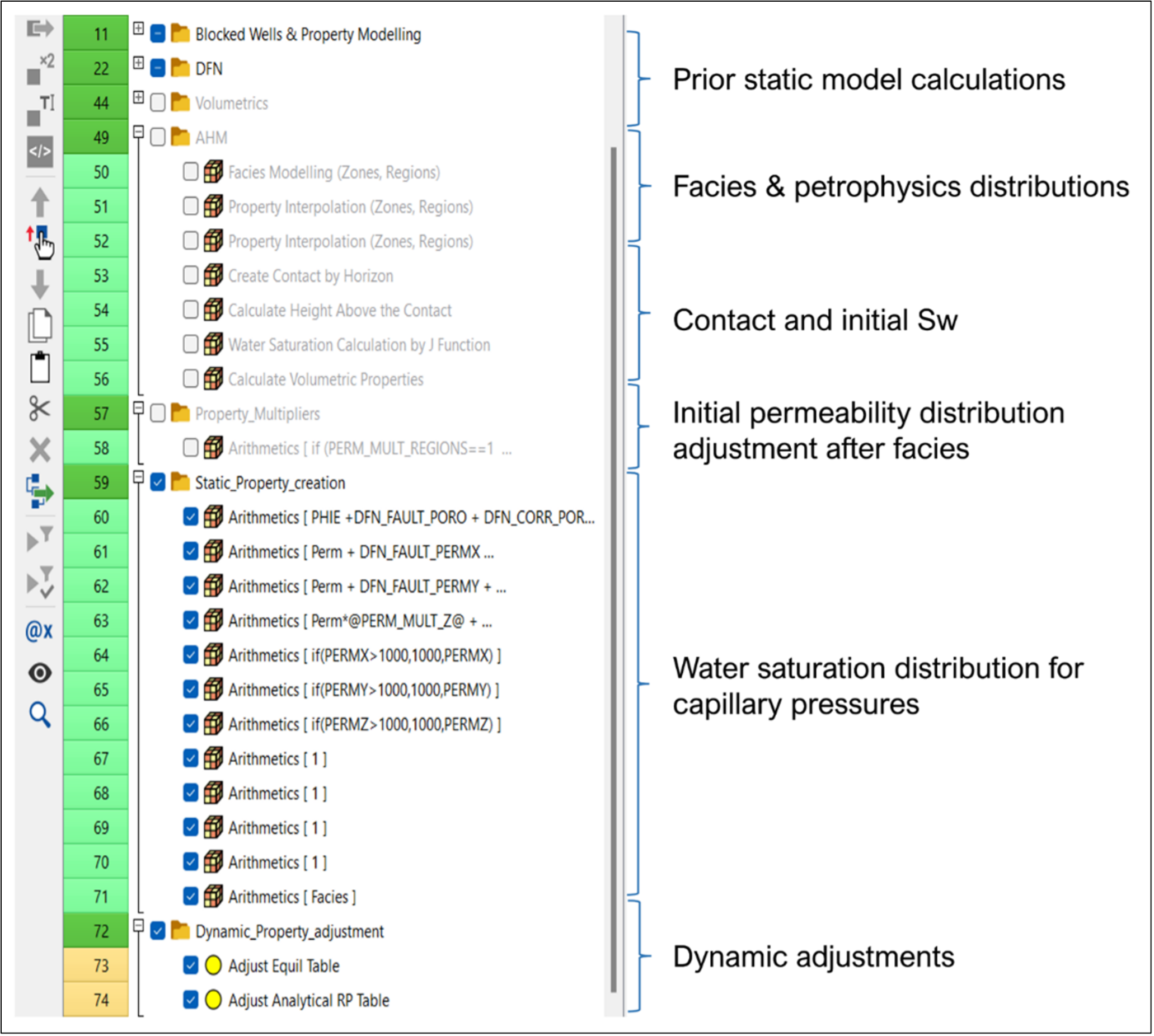
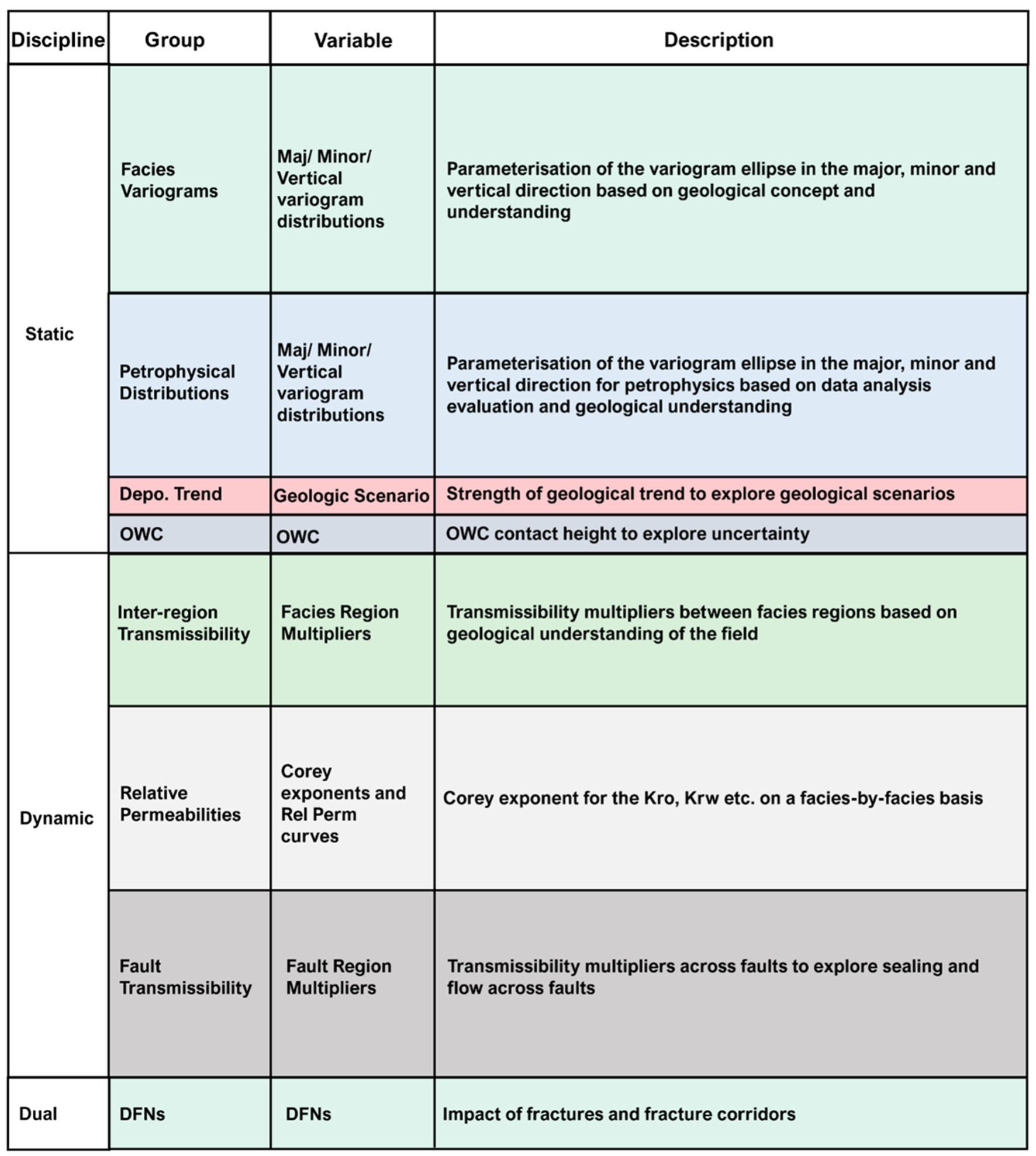
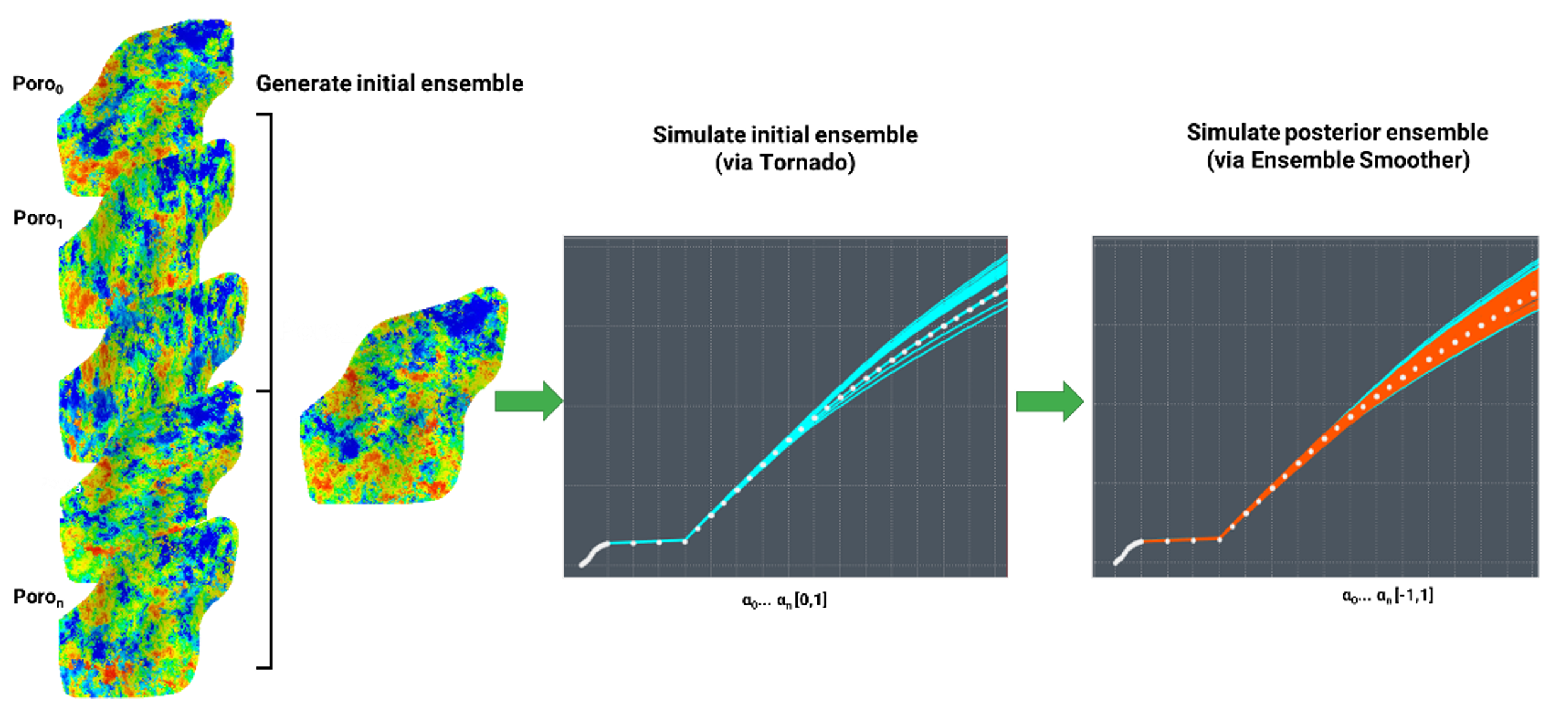
图3 快速“建模-模拟-历史拟合”的模型更新高级流程中的不确定性参数
1
tNavigator独有的GPU加速优势;
2
高保真的保留储层整体建模的精度,实时更新地质模型和认识数值模拟对油气藏的动用情况,替代人工修改局部地质模型所带来的生产误差和认识错误;
3
对油气藏的动用可实时认识和修正,快速进行措施决策,达到数字孪生系统层面。